麻省理工学院计算机科学与人工智能实验室(CSAIL)教授Daniela Rus说,如果有人让你想象一个机器人,你可能会想到一个人形机器人或一些重型工业机器人手臂。“但对我来说,我想看到一个变化,”她告诉The Verge。
她在麻省理工学院的团队的最新工作就是一个完美的例子。这是一个机器人抓取器,设计用来抓取物体,但至少可以说,它的外观是非传统的。从视觉上看,它与橡胶郁金香或充气气球比科幻机器人手更相似。
这是独特的外观,使夹具如此潜在的有用。在它的橡胶皮肤下是一个折纸骨架,形状像海星。当气体被泵入和排出夹钳的密封外壳时,整个装置就像一朵花一样打开和关闭。
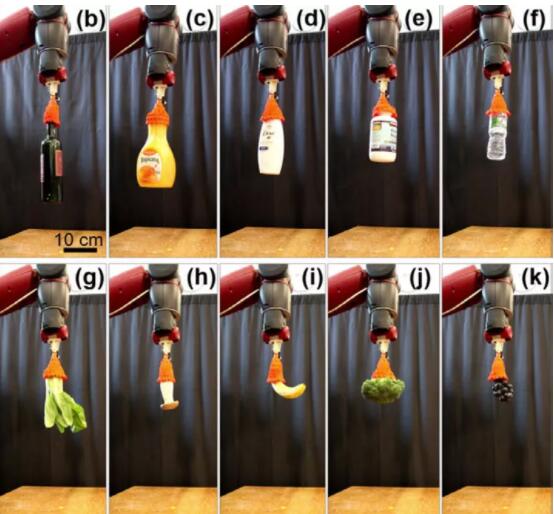
该设备能够在不伤害脆弱物体的情况下捡起它们,同时仍然保持足够强的抓地力,足以举起自身重量100倍的物体。罗斯在接受the Verge网站采访时表示:“通过将这种可折叠骨架与柔软的外部结合起来,我们得到了两个世界的最佳效果。”“我很高兴能用这样一只机械手开始抓取食品杂货。”
像这样的软式机器人抓手并不新鲜。在过去的十年里,这个领域经历了一次繁荣,工程师们希望利用软机械。一个自然的用例是物流:在仓库和工厂中挑选物品。尽管这些工作大部分都是自动化的,但像亚马逊这样的公司仍然广泛地雇佣人类来处理单个物品,将它们装入袋子和盒子。
这是因为传统的由金属和硬塑料制成的机器人钳子很难对付精致的物品和不规则的形状。一个失控的杀手机器人高喊“粉碎,摧毁”的老调重弹已经不远了。如今,在工厂里,如果没有把鸡蛋切成蛋卷、把橙子切成橙汁,一般的机器人是无法打开你的购物袋的。
软机器人抓手似乎是解决这一问题的最佳方案,在过去的几年里,这类技术得到了爆炸式的发展。像CSAIL这样的实验室,以及像right和Robotics这样的商业公司,都加入了这一行列,从充气机器人的手,到豆袋状的抓握器,再到章鱼触角形状的模块,他们都在开发各种各样的产品。
罗斯说,她的新夹具是一个比以往任何设计更好的解决方案。它的郁金香形状意味着它可以从一个真实的角度接近物体,而不是像手一样的钳子,通常必须从侧面接近物体。由于罗斯和她的团队在2017年首次推出的折纸骨架,它既有力量又有灵活性。
“这是第一次……创造一只可以做这些有用工作的机械手。”
至于为什么这些设备还没有被采用,罗斯说,这是因为商业解决方案还没有赶上“实验室里的创新”。另一个原因可能是机构惯性。一旦公司投资购买了昂贵的设备,更换设备就不是一个容易的决定,尤其是如果更新硬件可能意味着重新安排整个生产线的话。
毫无疑问,软机器人领域仍在不断涌现出各种稀奇古怪的、潜在有用的发明。如果罗斯和她的同事们能如愿以偿,不久之后,我们脑海中的机器人形象就会永远改变。罗斯说:“据我们所知,这是首次创造出能做如此有用工作的机械手。”